
Selecting the best motor type for different applications depends on several criteria such as the system’s accuracy, cost, torque, and acceleration. Generally, motors such as DC motors, servo motors, and stepper motors meet the needs of engineers in various applications and are among the most widely used types of industrial motors. Many people misunderstand that there is a significant difference between DC motors, servo motors, and stepper motors. To understand the differences between these three types of motors, this article briefly examines the differences between them.
Different and fundamental factors must be considered when choosing between a DC motor, a servo motor, and a stepper motor, different and fundamental factors such as cost, speed, torque, acceleration, and motor driver.
DC Motors
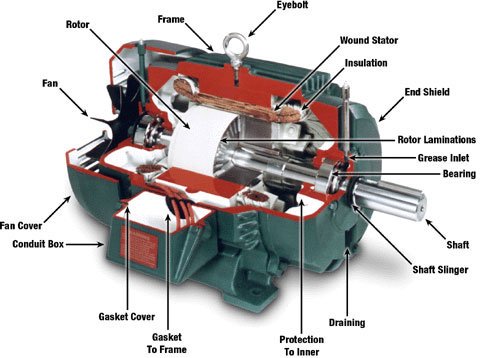
DC motors are a kind of motors with continuous running, which start rotating when power is applied and continue to rotate until power is removed. Most DC motors operate at high speeds. Due to this capability, these types of motors are used in computers as Air Conditioners, in the automotive industry for tire testing, and in the construction of automatic doors, quadcopters, and wherever engineers need rotation but do not need a lot of start and stop and do not need to position the rotation in a certain degree. The internal view and components of a DC motor are shown in the figure below.
To control the speed of a DC motor we can use the Pulse Width Modulation (PWM) technique. Pulse Width Modulation is a technique for obtaining controlled output voltage from a constant and variable input voltage. Additionally, torque control is also possible by changing the current.
Servo Motor
In general, a servo motor is an integrated of four components: a DC motor, a control circuit, a gear set, and a potentiometer or position sensor.
The position of a servo motor can be controlled with greater precision compared to other motors. In fact, in the mechanism of a servo motor, a closed-loop control system is used to obtain feedback on the shaft’s position. These motors have three wires: POWER, GND, and control SIGNAL.
These motors are continuously powered, and by the control circuit, the servo motor is positioned at a specific location. DC servo motors are designed for more precise tasks where precise positioning is required, such as moving a robotic arm, controlling boat pedals, controlling robot legs within a specific range, and so on.

Servo motors apply electric power to set the shaft position based on the control signal they receive. In these motors, pulse width modulation (PWM) is also used for the control signal. However, in servo motors, the duration of the positive pulse controls the shaft position and to some extent its speed.
Increasing the pulse length causes the servo motor to rotate clockwise, and a short pulse causes the servo motor to rotate counterclockwise.
The control signal for a servo motor is usually applied every 20 milliseconds and specifies the position the servo motor should be in. Even if an external force is applied to the shaft, it remains in the designated position.
In short, an important difference between the control pulse of a servo motor and a DC motor is that in a servo motor, the off time of the signal in one duty cycle does not matter. The important thing is the duration of the on-time, which determines the position of the motor shaft.
Stepper Motor
A stepper motor essentially has a different structure than the other two. While a servo motor consists of a DC motor and a control circuit, stepper motors use magnetic materials with specific air gaps to set the position. Each pulse sent to the motor causes the motor axis to move to a certain angle, which is called the step angle.
One notable feature of stepper motors is that they do not require feedback position or speed sensors to control the motor’s position or speed. Even when not in motion, a stepper motor has its full torque as long as an electricity current exists in the system.

Stepper motors are divided into two categories: Unipolar and Bipolar.
The main difference between unipolar and bipolar stepper motors is in their winding structure, which also affects their performance. In unipolar stepper motors, each phase has a single winding. To change the motor’s direction, the direction of the input current must also change. Due to utilizing the full capacity, unipolar stepper motors generate more torque in their windings. In bipolar stepper motors, each winding consists of two coils with a common center tap. At any given moment, only one coil is in use, that is for a specific direction of motor rotation. To change the motor’s direction, the current direction in the winding should be reversed.
Positive and Negative Aspects of Servo Motors, Stepper Motors, and DC Motors
The advantages and disadvantages of DC motors, servo motors, and stepper motors are as follows:
DC Motors: DC motors are among fast and continuous motors mainly used for anything that requires high-speed rotation, such as car wheels, fans, etc. However, DC motors have low reliability at low speeds and large dimensions at high powers.
Servo Motors: Servo motors have a fast and precise rotation with high torque within a limited angle. Additionally, due to their advanced control drive system, they operate without vibration. They are considered a high-performance alternative to stepper motors but with more complex settings. These motors are widely used in 3D printers, CNC machines, and other devices where position control is crucial.
Stepper Motors: With the right pulse input and frequency, a significant range of motor speeds is accessible. They also have precise and repeatable motion and offer higher reliability and longer lifespans due to their non-cogging nature. However, stepper motors may suffer from resonance if not properly controlled and can have poor performance at high speeds.




{kind=link}
{kind=link}